5V 4-phase Stepper Motor+ Driver Board ULN2003



| รหัสสินค้า | SKU-00445 |
| หมวดหมู่ | Motor/ Servo |
| ราคา | 70.00 บาท |
| สถานะสินค้า | พร้อมส่ง |
| ลงสินค้า | 28 ส.ค. 2565 |
| อัพเดทล่าสุด | 28 ส.ค. 2565 |
| คงเหลือ | ไม่จำกัด |
| จำนวน | ชิ้น |

รายละเอียดสินค้า
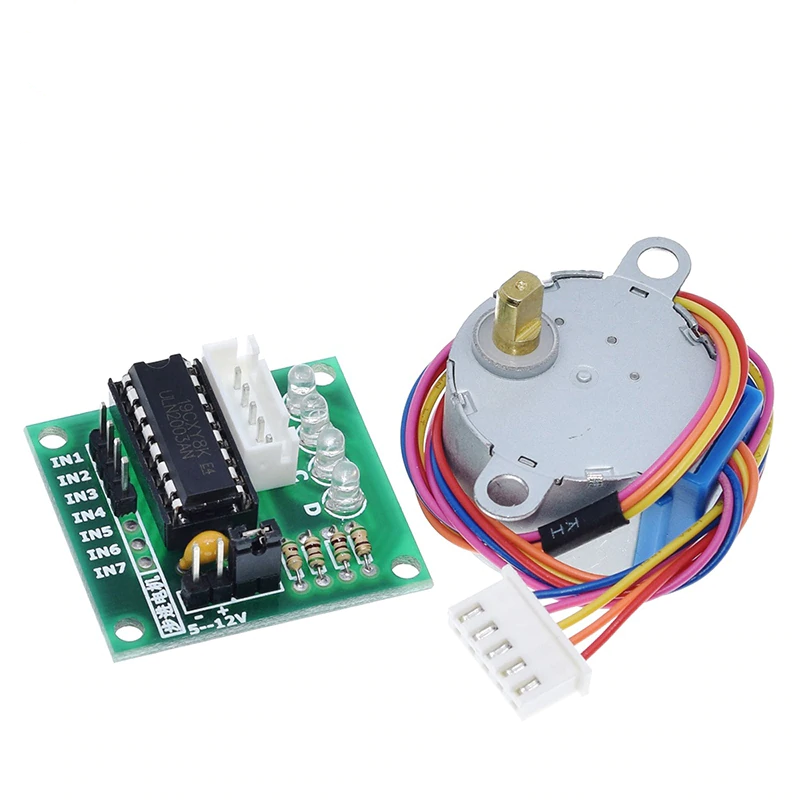
5V 4-phase Stepper Motor+ Driver Board ULN2003
สเตปปิ้งมอเตอร์ 5 โวลต์ 4 เฟส พร้อมบอร์ดไดรเวอร์ขับใช้ IC ULN2003 ต่อเข้ากับ Arduino ใช้งานได้เลย
- Rated Voltage: DC5V
- 4-phase
- Reduction Ratio: 1/64
- Step Torque Angle: 5.625°/64
- DC Resistance: 200Ω±7% (25℃)
- Insulation Resistance: >10MΩ (500V)
- Dielectric Strength: 600V AC / 1mA / 1s
- Insulation Grade: A
- No-load Pull in Frequency: >600Hz
- No-load Pull out Frequency: >1000Hz
- Pull in Torque: >34.3mN.m(120Hz)
- Detent Torque: >34.3mN.m
- Temperature Rise: <40K(120Hz)
- Board Size: Approx. 29 ×21 mm
________________________________________________________________________________________________
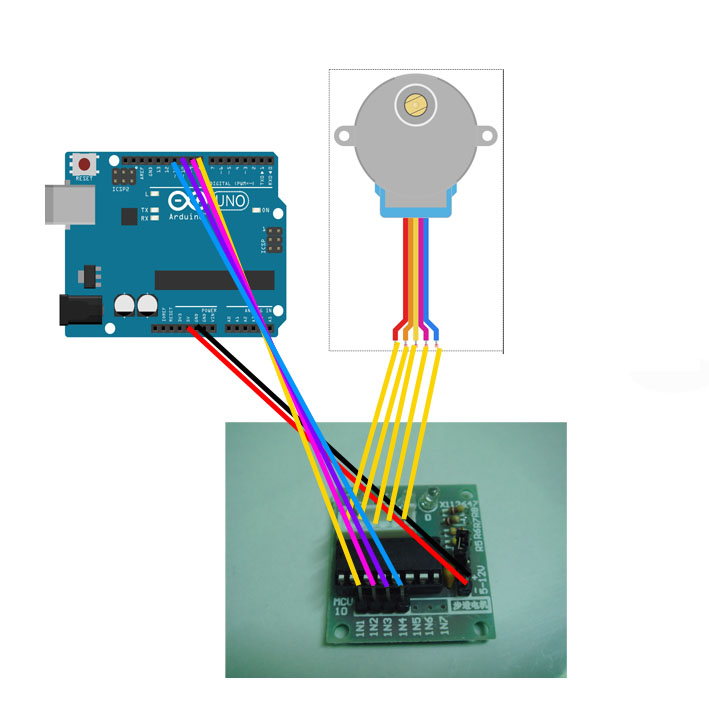
วิธีการต่อขา ใช้งาน
Arduino pin 8 -> 1N1
Arduino pin 9 -> 1N2
Arduino pin 10 -> 1N3
Arduino pin 11 -> 1N4
ตัวอย่างCode
int motorPin1 = 8;// Blue - 28BYJ48 pin 1
int motorPin2 = 9;// Pink - 28BYJ48 pin 2
int motorPin3 = 10;// Yellow - 28BYJ48 pin 3
int motorPin4 = 11;// Orange - 28BYJ48 pin 4
int motorSpeed = 4; //variable to set stepper speed
char val = '0';
void setup() {
//declare the motor pins as outputs
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(motorPin3, OUTPUT);
pinMode(motorPin4, OUTPUT);
Serial.begin(9600);
}
void loop(){
if (Serial.available())
{
val = Serial.read();
Serial.println(val);
}
if (val == '1'){
clockwise();
}
if (val == '2'){
counterclockwise();
}
if (val == '0'){
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, LOW);
}
}
void counterclockwise (){
// 1
digitalWrite(motorPin1, HIGH);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, LOW);
delay(motorSpeed);
// 2
digitalWrite(motorPin1, HIGH);
digitalWrite(motorPin2, HIGH);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, LOW);
delay (motorSpeed);
// 3
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, HIGH);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, LOW);
delay(motorSpeed);
// 4
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, HIGH);
digitalWrite(motorPin3, HIGH);
digitalWrite(motorPin4, LOW);
delay(motorSpeed);
// 5
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, HIGH);
digitalWrite(motorPin4, LOW);
delay(motorSpeed);
// 6
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, HIGH);
digitalWrite(motorPin4, HIGH);
delay (motorSpeed);
// 7
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, HIGH);
delay(motorSpeed);
// 8
digitalWrite(motorPin1, HIGH);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, HIGH);
delay(motorSpeed);
}
void clockwise(){
// 1
digitalWrite(motorPin4, HIGH);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin1, LOW);
delay(motorSpeed);
// 2
digitalWrite(motorPin4, HIGH);
digitalWrite(motorPin3, HIGH);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin1, LOW);
delay (motorSpeed);
// 3
digitalWrite(motorPin4, LOW);
digitalWrite(motorPin3, HIGH);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin1, LOW);
delay(motorSpeed);
// 4
digitalWrite(motorPin4, LOW);
digitalWrite(motorPin3, HIGH);
digitalWrite(motorPin2, HIGH);
digitalWrite(motorPin1, LOW);
delay(motorSpeed);
// 5
digitalWrite(motorPin4, LOW);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin2, HIGH);
digitalWrite(motorPin1, LOW);
delay(motorSpeed);
// 6
digitalWrite(motorPin4, LOW);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin2, HIGH);
digitalWrite(motorPin1, HIGH);
delay (motorSpeed);
// 7
digitalWrite(motorPin4, LOW);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin1, HIGH);
delay(motorSpeed);
// 8
digitalWrite(motorPin4, HIGH);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin1, HIGH);
delay(motorSpeed);
}
แหล่งรวมความรู้เพิ่มเติม
วิธีการชำระเงิน
AFFILIATION

MEMBER


อีเมล : bancode.dev@gmail.com
TOP เลื่อนขึ้นบนสุด
